图德尔夫特的科学家们继续深入研究3D打印机技术,最近以高度可编程和软执行器的形式开发了先进的机器人技术。这种驱动器由硬材料和软材料制成,能够进行复杂的运动,研究人员认为这些机器人能够处理“微妙”物体并与人类一起工作。
作者詹巴兹、F.S.L.博伯特、M.J.米尔扎利和A.A.Zadpoor在最近出版的“超可编程的屈曲驱动软细胞机制”中对他们的项目进行了更多的解释,主要围绕由超材料制成的一些非常现代的机器人,这些机器人不仅具有灵活性,而且还有前所未有的功能。
论文的第一作者沙赫拉姆·詹巴兹解释说,这种材料中的织物对于软性机器人有很大的潜力,但迄今为止的可调性有限。
“我们现在提出了一些超可编程机械超材料的新设计,不仅可以选择驱动力和振幅,还可以在很宽的范围内调整驱动模式。我们还演示了这些软执行器如何在机器人中使用的一些示例,例如作为力开关、运动控制器、拾取和放置末端执行器,”詹巴兹说。
研究人员还研究了与缺陷相关的屈曲频率如何被用于制造一系列机械超材料;然而,这些类型的材料在很大程度上依赖于先进的可编程性。该团队创造了合理设计方法,具有高可编程性和软超材料,来应对必要的驱动力和驱动振幅。

研究人员开发了能够为机器人提供软触摸的软执行器(图片来源:代尔夫特理工大学)
阿米扎普尔教授解释说:“这种功能已经融入了材料中。”“因此,我们必须深入研究屈曲现象。这曾经被认为是设计失败的缩影,但在过去几年中被利用来开发具有先进功能的机械超材料。一般来说,软机器人,特别是软执行机构可以从这种设计材料中受益匪浅。然而,解开屈曲驱动材料的巨大潜力取决于解决目前设计的主要局限性,即其可编程性的有限范围。我们能够计算和预测更高的屈曲模式,并使材料倾向于这些更高的模式。”
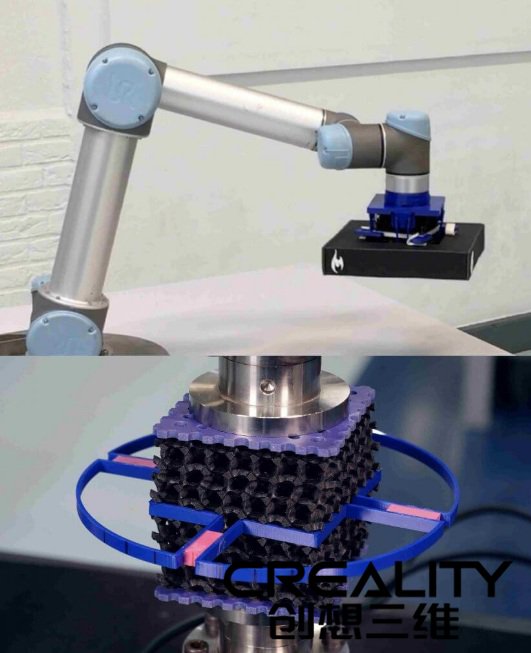
传统的机械臂是通过使用开发的软执行器进行修改,以在拾取和放置任务期间提供软接触。学分:代尔夫特理工大学
研究中的设计还包括双面屈曲,研究人员称之为新的“最低失稳模式”。它们还包括一种“预处理”软机械超材料的方法,以启动更高的失稳模式,而不依赖于其他边界。该团队合作创建了一个具有旋转屈曲模式的细胞机制,演示了作为力开关、运动控制器、拾取和放置末端效应器的功能。
詹巴兹说:“因此,我们提出了具有高可编程性的多材料屈曲驱动超材料。”“我们将基于预测计算模型的合理设计方法与先进的多材料3D打印制造技术相结合,将软、硬材料在单元中心和角落任意分布3D打印单元材料。以材料性能的几何分布和空间分布为主要设计参数,开发出具有驱动力和驱动振幅可调机制的软机械超材料。
扎波尔教授说:“你真正想要的是与人类手的特征相似的东西,包括柔软的触摸、快速而准确的动作和力量。”“这就是我们的软3D打印可编程材料努力实现的目标。”
Tu Delft的创新者一直是3D设计和制造领域的先驱,他们创造了4D家具等可以根据需要变形的产品、适应力的正交填充物,以及其他基于意图的3D打印等新工艺。


成员列表
 aab
aab
 DA
DA
 如今的我
如今的我
 超级无敌大萌比
超级无敌大萌比
 不破爱花
不破爱花
 带子
带子
 1个狠oK的男人
1个狠oK的男人
 aau3D雨人
aau3D雨人
 康宇杰
康宇杰
登录成功
祝您使用愉快!
倒计时 5 秒,自动关闭